Herleitung der lokalen Änderungsrate mittels h-Methode
In diesem Beitrag geht es um die Herleitung der h‑Methode, also um die Bestimmung der lokalen Änderungsrate an einem einzigen Punkt einer Funktion. Wenn du nicht an der Herleitung interessiert bist und nur ein Rechenbeispiel suchst, dann klicke hier.
Wiederholung: durschnittliche Änderungsrate
Bevor wir in die h‑Methode einsteigen, erinnern wir uns zunächst an die durchschnittliche Änderungsrate. Sie beschreibt die Steigung einer Sekante zwischen zwei Punkten \(A\) und \(B\) auf einer Kurve und ist damit das Vorwissen, das wir für die h‑Methode benötigen.
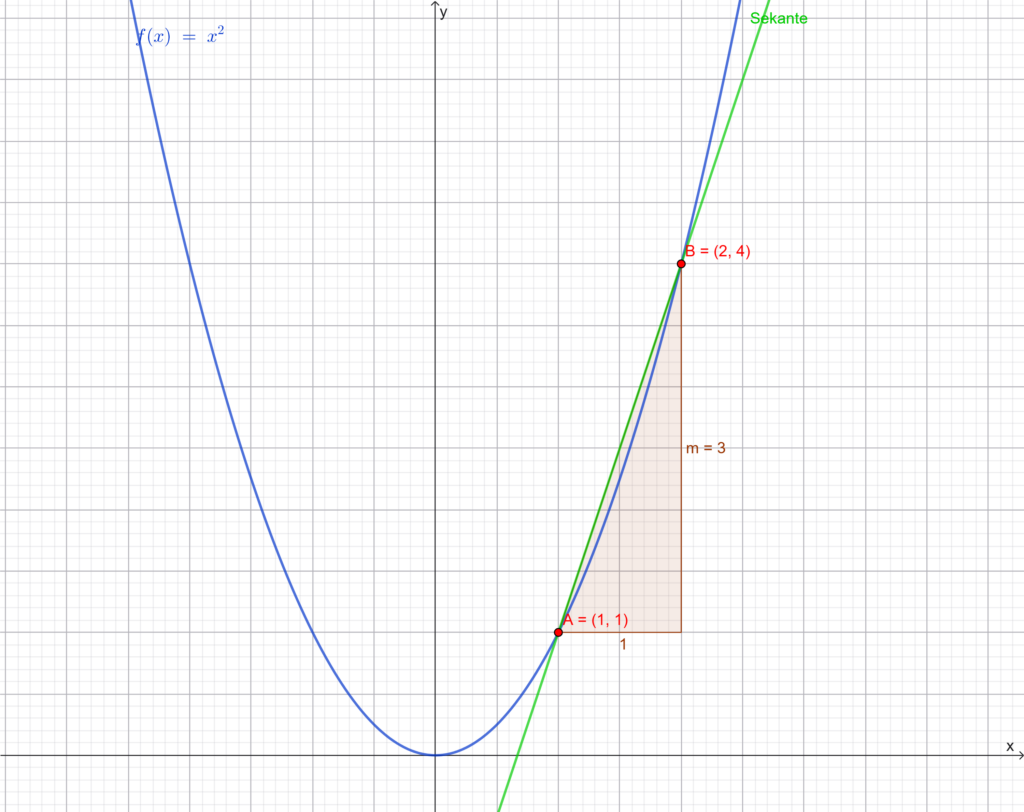
In dem Beitrag zur durchschnittlichen Änderungsrate haben wir diese anhand der Funktion \(f(x)=x^2\) zwischen den beiden Punkte \(A(1|1)\) und \(B(2|4)\) mit Hilfe des bestimmt Differenzenquotienten bestimmt:
\[ m_{[a,b]} = \frac{f(b)-f(a)}{b-a} \]Setzt man die Koordinaten von A und B ein, erhält man
\[ m_{[1,2]} = \frac{f(2)-f(1)}{2-1} = \frac{4-1}{1} = 3. \]Damit haben wir die Steigung der Sekante zwischen den Punkten \(A\) und \(B\) bestimmt. Nun wollen wir jedoch die Steigung an exakt dem Punkt \(A\), also die lokale Änderungsrate, bestimmen.
Durchschnittliche Änderungsrate umbauen…
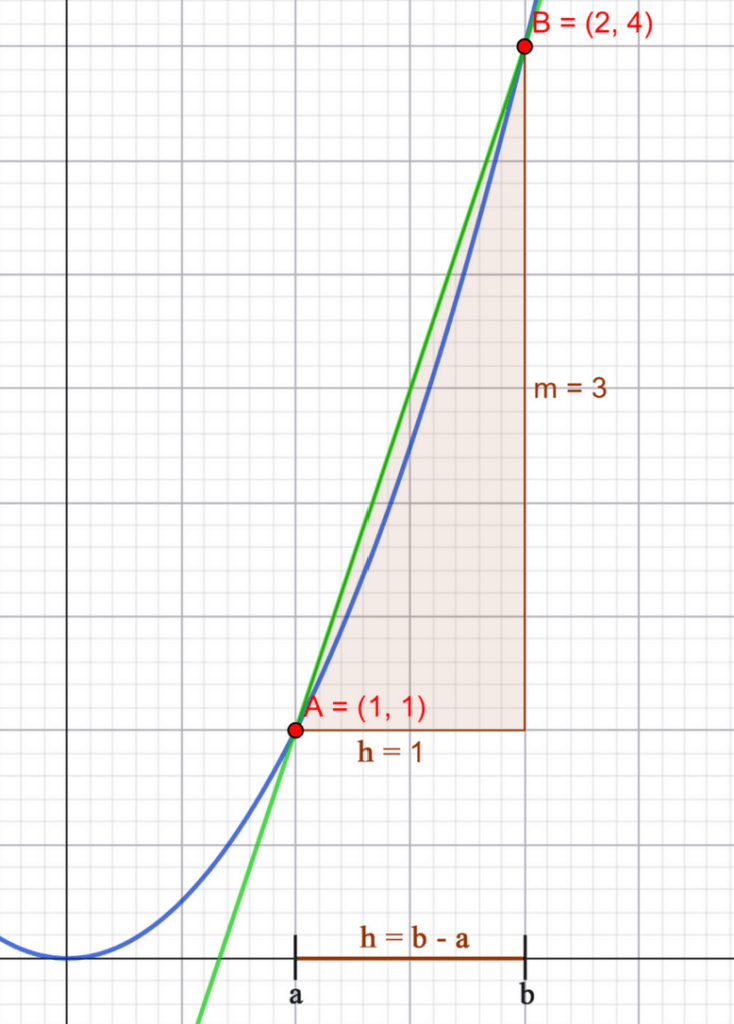
Um die lokale Änderungsrate zu bestimmen, beschreiben wir zunächst den Abstand zwischen den Punkten \( A\) und \( B \) durch den horizontalen Abstand \( h = b – a \).
Damit können wir die Gleichung für die durschnittliche Änderungsrate etwas umbauen:
Mit dieser Gleichung können wir genauso wie vorher auch die durchschnittliche Änderungsrate berechnen nur mit dem Vorteil, dass wir nun direkt den Abstand \( h \) einsetzen können.
Herleitung der lokalen Änderungsrate
Die erste Idee wäre, den Punkt \(B\) exakt auf den Punkt \(A\) zu legen, also \( B(1|1) \). Dann wäre der Differenzenquotient
\begin{align*} m_{h} &= \frac{f(h+a)-f(a)}{h} \\ m_{0} &= \frac{f(0+1)-f(1)}{0} = \frac{0}{0}. \end{align*}Da der Nenner Null wird, ergibt sich ein undefinierter Ausdruck, der in der Praxis als Null interpretiert werden würde. Dies macht keinen Sinn, denn die Tangente an der Stelle \( x=1 \) hat eine Steigung größer als Null, wie die graphische Darstellung zeigt.
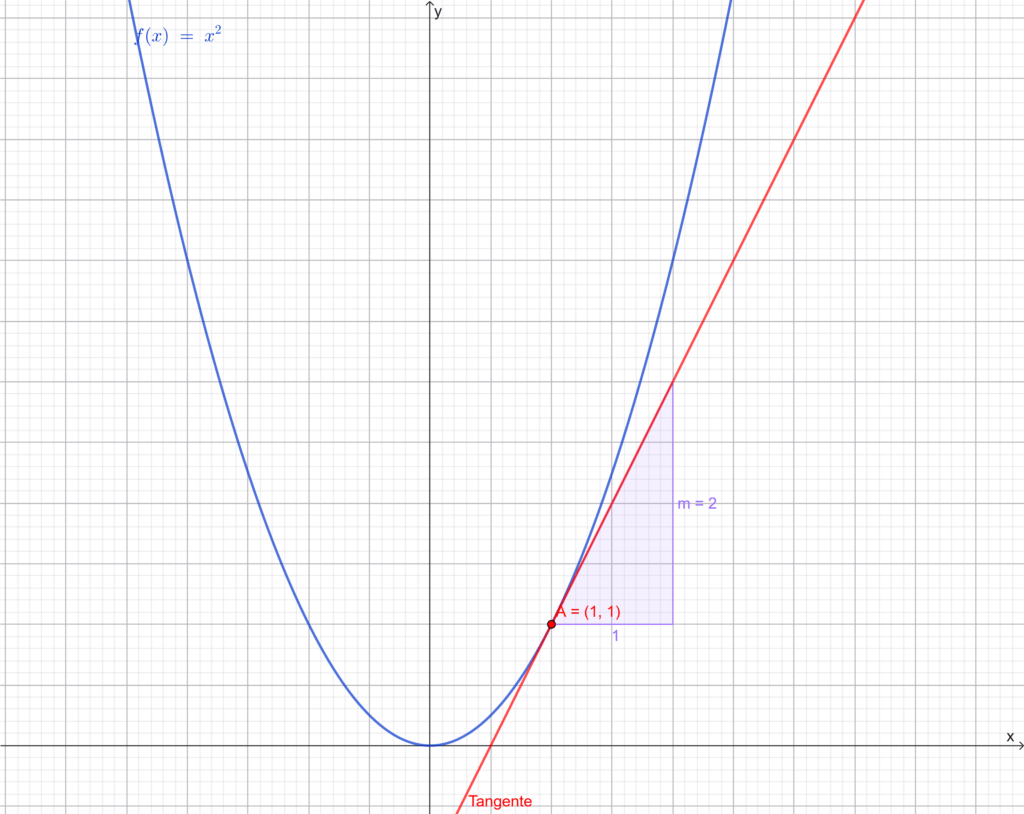
Demnach dürfen wir für den Abstand \( h = 0 \) nicht zulassen. Eine andere Idee besteht darin, \(B\) nicht exakt auf \(A\) zu platzieren, sondern sehr nahe an \(A\). Damit wäre \( h \neq 0 \).
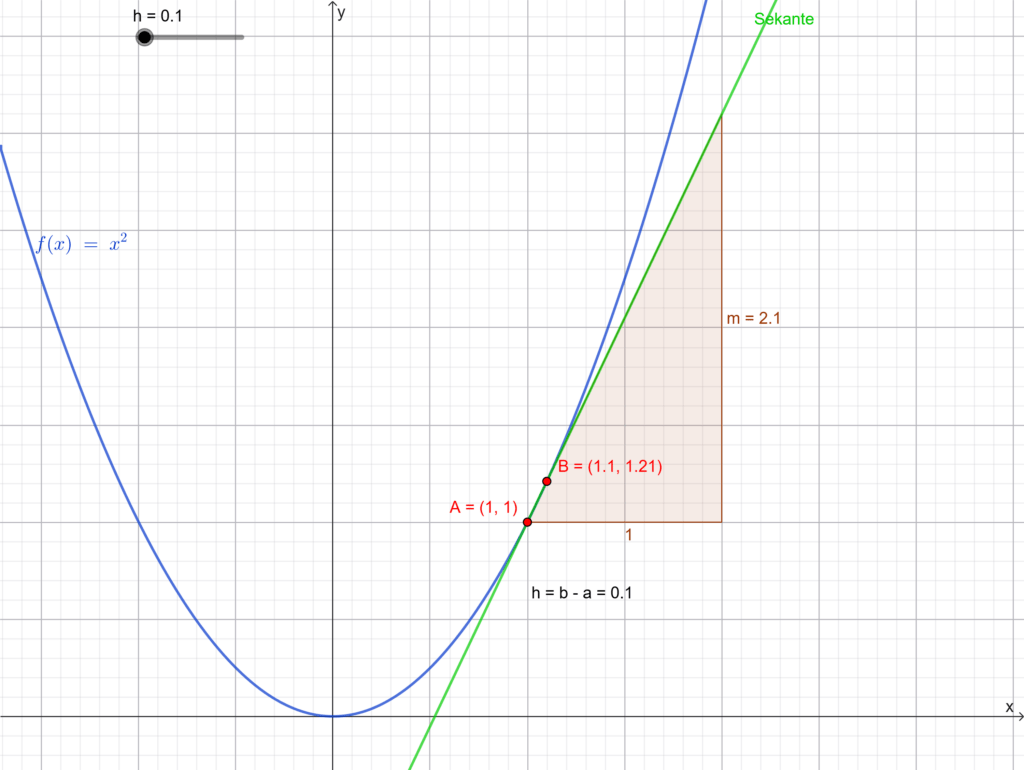
Wir wählen also den zweiten Punkt \( B \) auf der Kurve, der nicht exakt auf \( A \) liegt, sondern nur einen kleinen horizontalen Abstand \( h \) von \( A \) entfernt ist. Beispielsweise setzen wir für \( B \) die Koordinaten \( B(1,1 \mid f(1,1)) \).
Wenn wir mit diesen neuen Werten den Differenzenquotienten berechnen, dann bekommen wir
\begin{align*} m_h &= \frac{f(h+a)-f(a)}{h} \\ m_{0,1} &= \frac{f(0,1+1)-f(1)}{0,1} = 2,1. \end{align*}Da der Punkt \( B \) nicht exakt auf \( A \) liegt, und somit der horizontale Abstand \( h = 1,1 – 1 =0,1 \neq 0\) ist, handelt es sich bei unserem Ergebnis von \(m = 2,1 \) um nur ein ungefähres Ergebnis. Um die Genauigkeit zu erhöhen, verkleinern wir \( h \) weiter. In der folgenden Animation wird der Abstand \(h\) immer weiter verkleinert. Wie verhält sich die Steigung \( m \), wenn \(h \) immer kleiner wird?
Anhand der Animation kann man erkennen, dass die Steigung \( m \) sich immer weiter an den Wert \( 2 \) annähert. Wenn wir nun also \( h \) sehr klein wählen, dann könnte man behaupten, dass die Steigung
\[ m \approx 2. \]Hierbei handelt es sich immer noch um ein ungefähres Ergebnis. Nun stellt sich die Frage, wie der exakte Wert für die lokale Änderungsrate \( m \) bestimmt werden kann. Hierfür muss der Abstand \( h \) so klein wie möglich, aber \( \neq 0 \) gesetzt werden. Also muss \(h \) unendlich klein werden! Hierfür haben Mathematiker ein Werkzeug: den Limes.
Damit lässt sich die Gleichung für die durchschnittliche Änderungsrate wie folgt umschreiben:
\[ m = \lim_{h \rightarrow 0} \left( \frac{f(h+a)-f(a)}{h} \right) \]Mit dieser Gleichung kann nun der exakte Wert für die lokale Änderungsrate an einer Stelle \( x = a \) bestimmt werden. Hier gelangst du zu einem Rechenbeispiel.
[…] Herleitung der lokalen Änderungsrate mittels h-Methode […]